
变换的应用#
- 旋转
- 缩放
- 位置移动
- 光栅化
二维变换#
缩放 (Scale Matrix)#
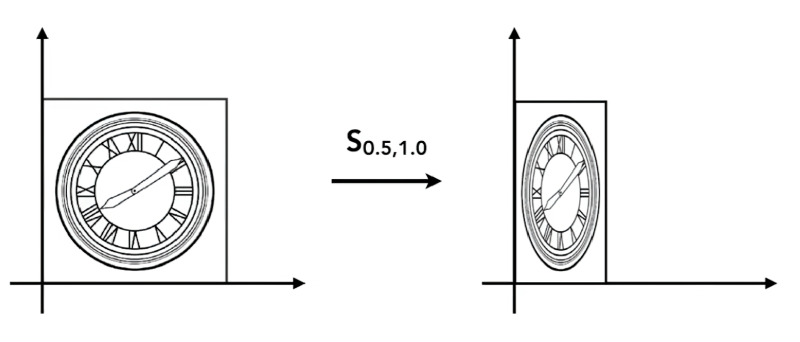
缩放变换是线性代数和计算机图形学中最基础的几何变换之一,用于将图形按比例放大或缩小.
- 数学表达 对于平面上任意一点 \((x, y)\),经过缩放因子为 \(s\) 的变换后,新坐标 \((x', y')\) 为:
当 \(s > 1\) 时,图形放大。
当 \(0 < s < 1\) 时,图形缩小(如图中 \(s=0.5\))。
当 \(s = 1\) 时,图形大小不变(恒等变换)。
矩阵形式
翻转 (Reflection Matrix)#
2D 翻转(反射)是把图形沿某条直线(轴)做镜像,得到对称图形。
常见:沿 x 轴翻转、沿 y 轴翻转、沿原点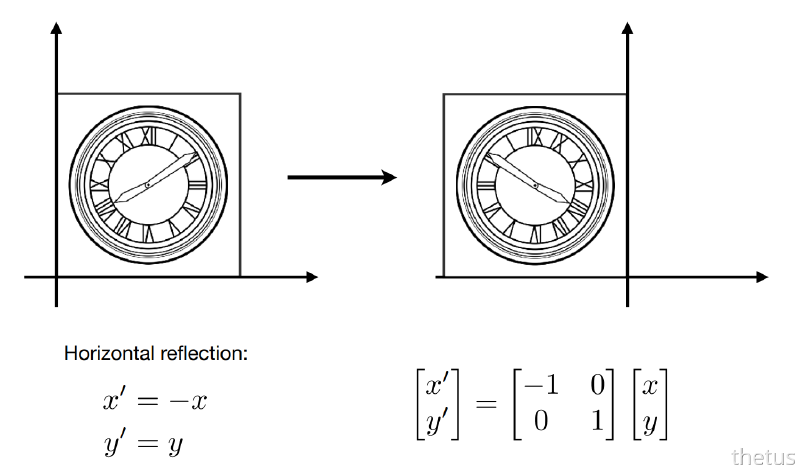
矩阵形式
$$ \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} -1 & 0 \\ 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} $$沿 x 轴:y 变号
沿 y 轴:x 变号
沿原点:x、y 都变号
矩阵都是对角矩阵,对角线上是 ±1
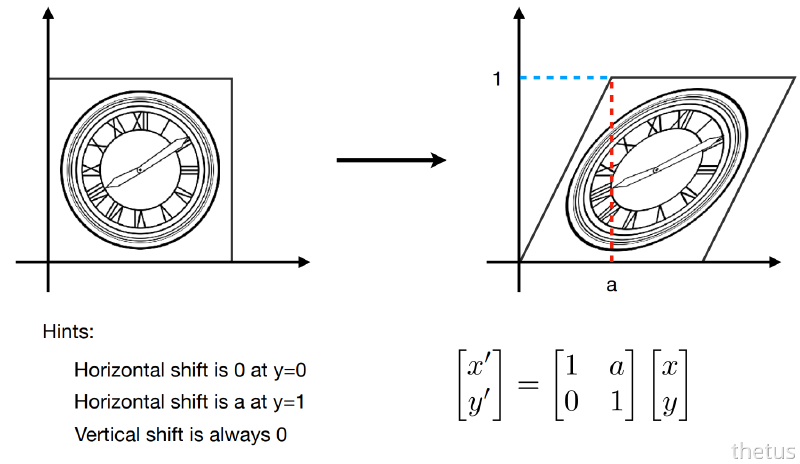
剪切 (Shear Matrix)#
剪切变换(shear transformation)是空间线性变换之一,是仿射变换的一种原始变换。它指的是类似于四边形不稳定性那种性质,方形变平行四边形,任意一边都可以被拉长的过程。
旋转 (Rotation Matrix)#
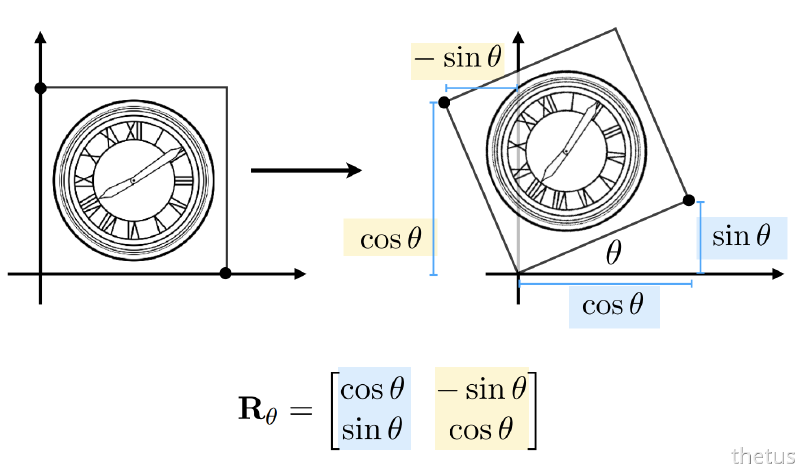
二维绕原点旋转矩阵推导
几何原理
取坐标系单位基向量,旋转后坐标直接构成矩阵列:
- 基向量 \(\boldsymbol{i}=(1,0)\) 逆时针转\(\theta\) → \((\cos\theta,\sin\theta)\)
- 基向量 \(\boldsymbol{j}=(0,1)\) 逆时针转\(\theta\) → \((-\sin\theta,\cos\theta)\)
关键记忆点
- 第一列:x轴基向量旋转结果
- 第二列:y轴基向量旋转结果
- 负号固定在右上 \(-\sin\theta\) → 仅适用于 逆时针 $$boldsymbol{R}_{-\theta}=\begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&\cos\theta\end{bmatrix}$$
- 顺时针旋转θ,负号移到左下: $$ \boldsymbol{R}_{-\theta}=\begin{bmatrix}\cos\theta&\sin\theta\\-\sin\theta&\cos\theta\end{bmatrix} $$
线性变换 = 矩阵(Linear transforms = Matrices)#
核心结论#
所有二维线性变换,都可以用一个同维度的方阵表示,这是线性代数、计算机图形学的底层核心。
线性变换的代数形式#
二维平面内任意点 \((x,y)\)经过线性变换后得到新坐标 \((x',y')\),满足一次齐次线性关系:
$$ \begin{cases} x' = ax + by \\ y' = cx + dy \end{cases} $$矩阵形式(列向量标准式)#
将线性方程组改写为矩阵 × 列向量的形式,是图形学、线性代数的通用写法:
$$ \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} $$向量简化形式#
用向量符号统一表达,形式更简洁:
$$ \mathbf{x}' = \mathbf{M}\mathbf{x} $$- \(\mathbf{x}\):原坐标列向量 - \(\mathbf{x}'\):变换后坐标列向量
- \(\mathbf{M}\):线性变换矩阵(2×2方阵)
核心意义#
- 一切线性变换(旋转、缩放、翻转、剪切)本质都是一个矩阵
- 变换的组合 = 矩阵的乘法
- 变换的逆操作 = 矩阵的逆
- 仅包含x、y一次项,无常数项、无高次项,才是线性变换
记忆要点#
线性变换无平移、无常数偏移,仅由坐标的线性组合构成,可完全由方阵描述。
齐次坐标 (Homogeneous coordinates)#
核心问题:平移变换(Translation)不属于线性变换,无法用普通矩阵乘法表示,引入齐次坐标之后,平移和旋转能统一用矩阵乘法
- 统一平移矩阵和线性变换矩阵,使其可以直接参与运算
- 为向量拓展一个维度,使得一个三维变量可以区分表示为向量和点(w为1为点,w为0为向量,保证向量的平移不变性)
原始仿射变换公式(乘法 + 加法,无法统一):
$$ \begin{bmatrix}x' \\ y'\end{bmatrix}=\begin{bmatrix}a & b \\c & d\end{bmatrix}\begin{bmatrix}x \\ y\end{bmatrix}+\begin{bmatrix}t_x \\ t_y\end{bmatrix} $$解决方案:引入齐次坐标,将平移也转化为矩阵乘法形式
2D 平移矩阵(齐次坐标形式):
$$ \begin{bmatrix}x' \\ y' \\ 1\end{bmatrix} = \begin{bmatrix}1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\end{bmatrix}\begin{bmatrix}x \\ y \\ 1\end{bmatrix} = \begin{bmatrix}x + t_x \\ y + t_y \\ 1\end{bmatrix} $$向量平移验证(w=0,不受影响):
$$ \begin{bmatrix}1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\end{bmatrix}\begin{bmatrix}x \\ y \\ 0\end{bmatrix} = \begin{bmatrix}x \\ y \\ 0\end{bmatrix} $$点与向量的运算规则
| 运算 | 结果 | 齐次坐标验证 |
|---|---|---|
| 向量 + 向量 | 向量 | (x₁,y₁,0) + (x₂,y₂,0) = (x₁+x₂, y₁+y₂, 0) |
| 点 - 点 | 向量 | (x₁,y₁,1) - (x₂,y₂,1) = (x₁-x₂, y₁-y₂, 0) |
| 点 + 向量 | 点 | (x,y,1) + (dx,dy,0) = (x+dx, y+dy, 1) |
| 点 + 点 | 中点 | (x₁,y₁,1) + (x₂,y₂,1) = (x₁+x₂, y₁+y₂, 2) → 归一化 → (x₁+x₂/2, y₁+y₂/2, 1) |
点 + 点 = 中点 的解释
两个点相加得到 (x₁+x₂, y₁+y₂, 2),w=2 不是标准形式
归一化:除以 w,得到 (x₁+x₂/2, y₁+y₂/2, 1),这正是两点的中点
二维齐次坐标#
$$\text{点: } \begin{bmatrix} x \\ y \\ 1 \end{bmatrix},\quad \begin{bmatrix} x \\ y \\ w\end{bmatrix} \text 表示点 \begin{bmatrix} \frac{x}{w} \\ \frac{x}{w} \\ 1 \end{bmatrix}, \quad \text{向量: } \begin{bmatrix} x \\ y \\ 0 \end{bmatrix}$$二维仿射变换#
仿射映射 = 线性映射 + 平移变换
$$\begin{bmatrix}x' \\ y'\end{bmatrix}=\begin{bmatrix}a & b \\c & d\end{bmatrix}\begin {bmatrix}x \\ y\end{bmatrix}+\begin {bmatrix}t_x \\ t_y\end{bmatrix}$$使用齐次坐标表示仿射变换
$$\begin{bmatrix} x' \\ y' \\ 1\end{bmatrix}=\begin{bmatrix} a & b & t_x \\c & d & t_y \\0 & 0 & 1 \\\end{bmatrix} \cdot\begin {bmatrix} x \\ y \\ 1 \end {bmatrix}$$- 缩放 (Scale Matrix)
- 翻转 (Reflection Matrix)
- 平移 (Translation Matrix)
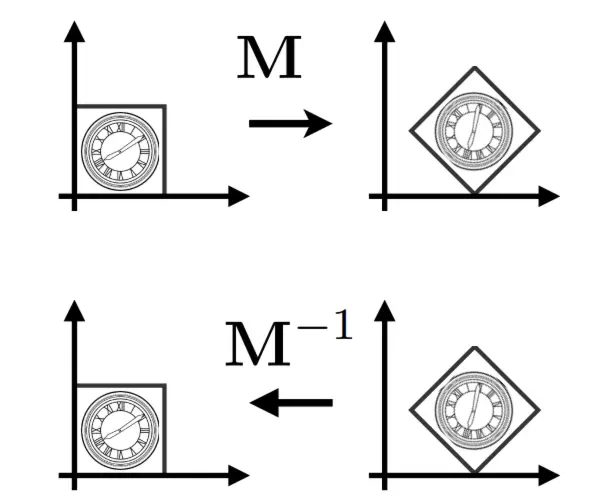
逆变换#
M⁻¹ 在矩阵和几何意义上都是变换 M 的逆。
组合变换#
平移、旋转、缩放变换可以组合起来
变换的顺序很重要,不能调换(矩阵的乘法不满足交换律)
$$ T_{(1,0)} \cdot R_{45} \neq R_{45} \cdot T_{(1,0)} $$可以通过矩阵的乘法来实现组合变换,从右到左的操作
$$ A_n(\dots A_2(A_1(\mathbf{x}))) = \mathbf{A}_n \cdots \mathbf{A}_2 \cdot \mathbf{A}_1 \cdot \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} $$
示例:先旋转 45 度,再平移 (1, 0)
$$ T_{(1,0)} \cdot R_{45} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & 1 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos 45^\circ & -\sin 45^\circ & 0 \\ \sin 45^\circ & \cos 45^\circ & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} \cos 45^\circ & -\sin 45^\circ & 1 \\ \sin 45^\circ & \cos 45^\circ & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} $$- 变换顺序:矩阵从右到左依次应用
- 复合矩阵:通过矩阵乘法,将多个变换合并为一个矩阵,提高计算效率。
- 齐次坐标:使用 \(\begin{bmatrix} x \\ y \\ 1 \end{bmatrix}\) 这种三维向量,是为了让平移也能通过线性变换(矩阵乘法)来表示。
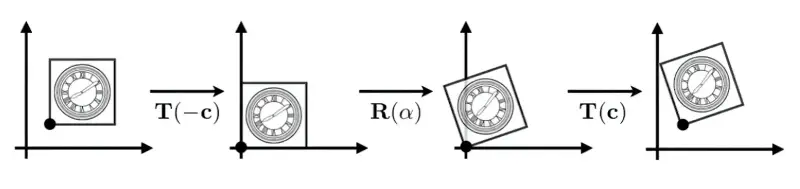
旋转中心不在原点:中心移动到原点->旋转->中心移动到原位置
$$ \mathbf{T}(\mathbf{c}) \cdot \mathbf{R}(\alpha) \cdot \mathbf{T}(-\mathbf{c}) $$三维变换#
$$ \begin{aligned} & \text{三维点(3D Point)}: (x, y, z, \mathbf{1})^T \\ &\text{三维向量(3D Vector)}: (x, y, z, \mathbf{0})^T \end{aligned} $$一般来说,(x, y, z, w)(其中 w ≠ 0)表示一个 3D 点:
$$ \text{3D Point} = \left( \frac{x}{w}, \frac{y}{w}, \frac{z}{w} \right) $$三维仿射变换#
$$ \underbrace{ \begin{pmatrix} x' \\ y' \\ z' \\ 1 \end{pmatrix} }_{\text{变换后点}} = \underbrace{ \begin{pmatrix} a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z \\ 0 & 0 & 0 & 1 \end{pmatrix} }_{\text{4×4 仿射变换矩阵}} \cdot \underbrace{ \begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix} }_{\text{原始点(齐次坐标)}} $$$$ \begin{aligned} x' &= a x + b y + c z + t_x \\ y' &= d x + e y + f z + t_y \\ z' &= g x + h y + i z + t_z \\ 1 &= 0 x + 0 y + 0 z + 1 \end{aligned} $$顺序(同二维):先线性变换再平移
缩放(Scale)和平移(Translation)#
$$ \text{Scale: } \mathbf{S}(s_x, s_y, s_z) = \begin{pmatrix} s_x & 0 & 0 & 0 \\ 0 & s_y & 0 & 0 \\ 0 & 0 & s_z & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} $$$$ \text{Translation: } \mathbf{T}(t_x, t_y, t_z) = \begin{pmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \end{pmatrix} $$旋转 (Rotation)#
绕坐标轴旋转#
旋转矩阵的性质
旋转θ的矩阵:
$$ R_\theta = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} $$旋转-θ的矩阵:
$$ R_{-\theta} = \begin{pmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{pmatrix} $$可以发现: \(R_{-\theta}\)恰好是 \(R_{\theta}\) 的转置,即:
$$ R_{-\theta} = R_\theta^T $$因此:
$$ R_\theta^{-1} = R_\theta^T $$这说明旋转矩阵是正交矩阵,其逆矩阵等于其转置矩阵。
绕X轴旋转
$$ \mathbf{R}_x(\alpha) = \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\alpha & -\sin\alpha & 0 \\ 0 & \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} $$绕Y轴旋转
$$ \mathbf{R}_y(\alpha) = \begin{pmatrix} \cos\alpha & 0 & \sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -\sin\alpha & 0 & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} $$为什么是 -sina : xoz是顺时针的,顺时针旋转了a,相当于逆时针旋转了-a,旋转是逆时针的,-a的旋转矩阵要求逆,也就是转置
- Z 轴(k)向右(X 正)偏 → 必然带动 X 轴(i)向下(Z 负)偏;
- 负号仅代表方向,sinα的绝对值是偏移的 “长度”。 绕Z轴旋转
欧拉角#
- 欧拉角描述相对于初始状态的变换,只和最终状态有关,与过程无关。
由于欧拉角(Euler)表示旋转时存在旋转轴的次序,当中间旋转轴旋转使得前后两个轴对齐时,就失去了一个旋转自由度,出现万向节死锁。可以使用四元数(Quaternion)解决该问题。
$$ \text{欧拉角:乘法顺序:从右到左执行} \quad \\\ \mathbf{R}_{xyz}(\alpha, \beta, \gamma) = \mathbf{R}_x(\alpha) \mathbf{R}_y(\beta) \mathbf{R}_z(\gamma) $$BILIBILI视频 【无伤理解欧拉角中的“万向死锁”现象】
罗德里格斯旋转公式(Rodrigues’ Rotation Formula)#
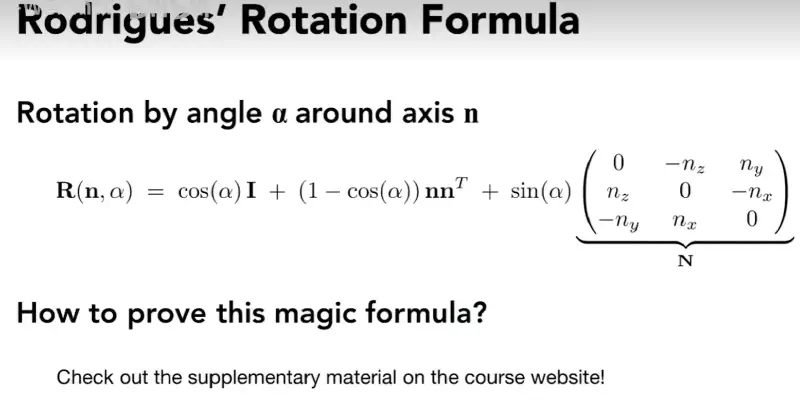
其中,反对称矩阵N 为:
推导: # 3D下的旋转矩阵 https://sites.cs.ucsb.edu/~lingqi/teaching/resources/GAMES101_Lecture_04_supp.pdf
四元数#
本课程不讲